




凹版印刷機真空脫泡機規劃與分析支招
時間:2015-12-31 作者:網絡編輯 點擊:次
? 規劃思維
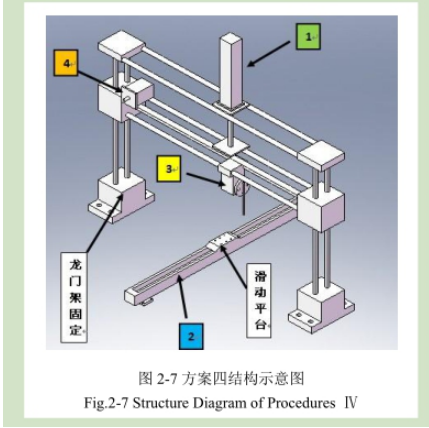
? 龍門架底座固定不動,依托電動缸(圖2-7中1所示)完成Z豎直方向定位;把真空脫泡機固定在滑動電動缸(圖2-7中2)上,經過滑動電動缸上面滑塊的運動完成真空脫泡機X向的移動定位圖。? 中2-7中標號4的步進電機經過鏈條合作傳動操控視點調整電機(圖2-7中3)沿條狀噴嘴移動,完成傳感器在Y方向的定位操控;步進電機操控傳感器度調整。
? 考慮到真空脫泡機分量對比大放在滑動電動滑臺上面可能會呈現滑臺滑塊受力不平衡,能夠在電動滑臺兩邊平行安放兩個平行導軌來供給平衡支持力,一起還能夠分管滑臺滑塊的接受分量。
? 此計劃在曾經規劃計劃的基礎上不斷的完善規劃思路,計劃全體可行性比前幾個計劃有所提高,可是真空脫泡機在滑動電動缸上面的滑動間隔為1200mm擺布,滑動間隔較長。
? 因為從空氣加熱器到真空脫泡機進風口間的管道是具有隔熱功能的軟質管,管道支持筋在受力情況下簡單變形,一起在通風管道過長的情況下會對進風口的風場散布有很大的影響,通風管道的性質約束了真空脫泡機的移動間隔;并且加熱模塊體積對比大并且對比重,這些特色很難完成它和真空脫泡機的同步移動。
